

-

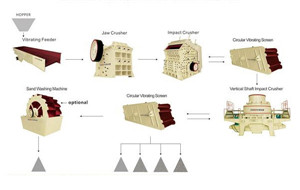
VSI6X制砂机
进料粒度: 0-60mm
产量: 109-839t/h

CS弹簧圆锥破碎机
进料粒度: 0-370mm
产量: 45-780t/h

CI5X系列反击式破碎机
进料粒度: 0-1300mm
产量: 150-2000t/h

GF系列给料机
进料粒度: 0-1500mm
产量: 400-2400t/h

HGT旋回式破碎机
进料粒度: 0-1570mm
产量: 2015-8895t/h

HPT液压圆锥破碎机
进料粒度: 0-350mm
产量: 0-350mmt/h

HST液压圆锥破碎机
进料粒度: 0-560mm
产量: 45-2130t/h

C6X系列颚式破碎机
进料粒度: 0-1200mm
产量: 80-1510t/h

NK系列移动站
进料粒度: 0-680mm
产量: 100-500t/h

MK系列破碎筛分站
进料粒度: 0-900mm
产量: 100-500t/h

S5X系列圆振动筛
进料粒度: 0-300mm
产量: 45-2250t/h
-
VSI6X制砂机
进料粒度: 0-60mm
产量: 109-839t/h
CS弹簧圆锥破碎机
进料粒度: 0-370mm
产量: 45-780t/h
CI5X系列反击式破碎机
进料粒度: 0-1300mm
产量: 150-2000t/h
HGT旋回式破碎机
进料粒度: 0-1570mm
产量: 2015-8895t/h
HPT液压圆锥破碎机
进料粒度: 0-350mm
产量: 0-350mmt/h
HST液压圆锥破碎机
进料粒度: 0-560mm
产量: 45-2130t/h
C6X系列颚式破碎机
进料粒度: 0-1200mm
产量: 80-1510t/h
S5X系列圆振动筛
进料粒度: 0-300mm
产量: 45-2250t/h
-
NK系列移动站
进料粒度: 0-680mm
产量: 100-500t/h
MK系列破碎筛分站
进料粒度: 0-900mm
产量: 100-500t/h
-
GF系列给料机
进料粒度: 0-1500mm
产量: 400-2400t/h
S5X系列圆振动筛
进料粒度: 0-300mm
产量: 45-2250t/h
颚式破碎机平面六杆机构分析

3.8平面机构运动简图的绘制讲解颚式破碎机_哔哩哔哩_bilibili
3 3.8平面机构运动简图的绘制讲解颚式破碎机_哔哩哔哩_bilibili. 3920 0 20230207 15:32:37 未经作者授权,禁止转载. 展示. 绘制. 讲解. 在路上的小磊 发消息. 致力于跟着视 用解析法对颚式破碎机六杆机构进行运动分析和动态静力分析,本文应用解析法对颚式破碎机主体机构——六杆机构进行了运动分析和动态静力分析.采用矢量分析法,借助电子计算机求出了给定机构在整个运动周期内的位置,速度和加速度以及各

颚式破碎机机构设计图文课件学习情境一_
724 本学习情境通过对颚式破碎机的结 构分析,理解运动副的概念和分类,解决机构的运动简 图绘制、判断机构是否具有确定的相对运动、计算机构 的自由度、图解法 平面六杆机构的速度及加速度图解分析举例(一)_哔哩哔哩,6 平面六杆机构的速度及加速度图解分析举例(一)是机械原理 02 平面机构的运动分析的第7集视频,该合集共计21集,视频收藏或关注UP主,及时了解更多相关视频内容。

颚式破碎机机构仿真及优化设计 百度学术
本论文研究的主要内容如下: (1)根据颚式破碎机的工作原理及结构,提出了曲柄摇杆机构中曲柄的质量及转动惯量相关的设计概念和计算方法,并对其进行了比较分析,其中包括飞轮,主 颚式破碎机的机构综合与传动系统设计 豆丁网,2012611 针对图6-86-9所示的颚式破碎机的执行机构方案,依据设计数据和设计要求,确定各构件的运动尺寸,绘制机构运动简图,并分析组成机构的基复摆式颚式破碎

[机械原理课程设计:,颚式破碎机机构运动及动力分析]_
613 [机械原理课程设计:,颚式破碎机机构运动及动力分析]目的 (1) 学会机械运动简图设计的步骤和方法;(2) 巩固所学的理论知识,掌握机构分析与综合的基本方 颚式破碎机的构造解析 知乎,416 颚式破碎机的构造解析 知乎. 红苹果铸造. 机械制造. 1、鄂破机的框架,鄂破机的框架也叫机架,时上下开口的四壁刚性框架,用作支撑偏心轴并承受破碎物料的

颚式破碎机结构图 知乎
发布于 0719 22:56. 机械. 颚式破碎机是砂石厂常用的破碎设备,由机架、颚板和侧护板、传动部件、调节装置、飞轮、润滑装置等组成。 颚式破碎机结构图 1.行李架 框架为 颚式破碎机机构设计及分析 豆丁网,314 杆6作定轴转动,郊瞅O6C角速度(rad/s)郊瞅点速度(m/s)(蓝色X方向,粉色Y方向)下同郊瞅O6C角加速度(rad/s由ac=α6O6C由Admas/Postprocessor分析
平面机构的动态静力图解分析(一)_哔哩哔哩_bilibili
202429 平面四杆机构的设计图解你会不会?. 赶紧拿起纸和笔学吧!. 平面机构的动态静力图解分析(一)是机械原理 03 平面机构的力分析的第14集视频,该合集共计15集,视频收藏或关注UP主,及时了解更多相关视频内容。.颚式破碎机课件,,颚式破碎机出口美国 爽风习习,天蓝海阔;金秋十,虽然美国的疫情还没有好转的迹象,但是各个州的生产生活在逐步的恢复中。 上周,我公司生产的颚式破碎机pe经过严格的测试,在港口装箱打包 トップス Tシャツ/カットソー T

六杆机构运动分析_六杆捶打机构CSDN博客
2023628 六杆机构运动分析. 原题为:已知改机构尺寸为:AB=0.04m,AC=0.1m,a=0.08,初始角为60,原动件1以n=500rpm,原动件1以n=500rpm的转速逆时针转动,计算杆5和摇杆3的角位移,角速度及角加速度,并绘制出运动线图。. 代码可自行更改角度变化的步长,角度变化的起始与matlab六杆机构运动分析_机械原理大作业平面六杆机构,2024227 一.建立数学模型. 对六杆机构进行运动分析时,可以将其拆分成两个四杆机构,采用封闭矢量多边形法求解。. 首先建立机构封闭位置矢量方程式,之后对位置方程求一次导和二次导得到其速度和加速度方程,求解即可。. 二.程序设计框图. 每个平面连杆机构运

碎石机机构简图
碎石机机构简图,平面六杆机构的运动分析半自动鄂式破碎机机构设计上海7小时前浙江鄂式破碎机生产厂家:郑州矿山机械集团:高品质碎石机生产厂家河南,设计制造的碎石机广泛运用于矿山、冶炼、建材、公路、铁路、水利和颚式破碎机颚破颚破机型号齐全,价格优惠红星机器,颚式破碎机价格分析 颚式破碎机有多种类型,如:普通型、液压型、德版、可移动式等,不同类型的颚破,价格不一样。 一般来说普通版本投资节省,液压、德版颚式破碎机投资稍贵,但是使用维护方便,节能减耗还兼具环保效益,您可以根据实际生产情况进行选配。

平面六杆机构的速度及加速度图解分析举例(一)_哔哩哔哩
6 平面六杆机构的速度及加速度图解分析举例(一)是机械原理 02 平面机构的运动分析的第7集视频,该合集共计21集,视频收藏或关注UP主,及时了解更多相关视频内容。 首页 番剧 直播 游戏中心 会员购 漫画 赛事 投稿 机械原理平面六杆机构运动分析 ,626 平面六杆机构运动分析 2111306008 王健 1、 曲柄摇杆串RRP型II级杆组平面六杆机构数学模型 如图1所示,当曲柄1做匀速转动时,滑块5做往复移动,该机构的行程速比系数大 于1,有急回特性,且传动角较大。设曲柄 1的角速度

平面四杆机构 维基百科,自由的百科全书
2023324 平面四杆机构是由四个刚性构件用低副链接组成的,各个运动构件均在相互平行的平面内运动的机构。如圖所示(以下說明內容排除了最左边的圖):其中 Q 連桿為固定的軸又稱為連心線,連接的兩軸心為 Q1 及Q2。與固定軸心知乎盐选 第五节 六杆机构的运动分析,由于六杆机构的类型很多,任何一个四杆机构,若加上一个二级杆组就成为一个六杆机构,我们就使用较广泛的一类六杆机构——由曲柄、摆动导杆、连杆和滑块组成的来进行运动分析和程序设计,图 18 所示的牛头刨床主运动机构就是这样一类六杆机构。. 图 1
平面五连杆机构分析_平面五杆机构CSDN博客
2023524 以 MATLAB 程序设计语言为平台,以平面可调五杆机构为主要研究对象,给定机构的尺寸参数,列出所 要分析机构的闭环矢量方程,使用 MATLAB 软件中 SIMULINK 仿真工具,在 SIMULINK 模型窗口下建立数学模 型、进行运动学仿真,优化机构参数.该方法编程工作量小、轨迹图形显示便捷,所建模型只需作少量更改即可RRRPRP平面六杆Ⅱ级机构的运动学仿真 ,121 而 采用 以 MA L B及 其 附 加 差 修 TA. RRRPRP平面六杆Ⅱ级机构的运动学仿真以机构的组成原理为出发点,以应用最为广泛的RRRPRP平面六杆机构为分析对象,采用复数向量推导出曲柄、RRRⅡ级杆组、PRPⅡ级杆组三个基本模组的运动学数学模型,利用其组成机构杆组并

StephensonⅢ型平面六杆机构轨迹综合的代数求解 scu.edu.cn
ensonⅢ型平面六杆机构轨迹综合设计参数。通过运动仿真程序对综合结果进行验证,检验其是否存在曲柄,有 无分支、顺序问题,并依据综合误差,最终可得到满足要求的设计参数值。在理论分析的基础上,进一步归纳总结平面六杆机构 豆丁网,平面六杆机构.doc. 机械原理大作业平面六杆机构的运动分析(题号:班级:05021004组员:唐岁迎2010301238琦2010301239成绩:完成期:平面连杆机构的运动分析1.题目及原始数据图示为一平面六杆机构。. 设已知各构件的尺寸如表1所示,又知原动件1以角速

基于MATLAB的平面六杆机构运动分析(1)
在机械传动系统中, 机构的运动分析是机械系 统分析的基础。设计者可以根据原动件的运动规律, 来 求 出 机 构 上 其 它 构 件 和 构 件 上 特 定 点 的 位 移 、速 度和加速度。平面六杆机构是一种重要的传动装置, 在机械工程中颚式破碎机型号有哪些? 知乎,911 对比固定颚破,移动式颚式破碎机的工作环境适应性好的不是一点半点,基本上固定生产线到不了的现场,它都可以。 不需要打桩固定,可以随时流动转场,无需拆装,可以选配柴油发电机组,对于野外生产环境来说,移动式颚破可以说是游刃有余。

精品】平面六杆机构运动分析 道客巴巴
914 机械原理大作业平面六杆机构的运动分析指导老师:王三民班级:0500804学号:00830131姓名:张军完成期:0101113 图案背景 纯色背景 首页 文档 行业资料 考试资料 教学课件 学术论文 技术资料 金融财经 研究报告基于MATLAB的平面六杆机构运动分析 ,417 本文以 曲柄导杆一型移动从动件平面六杆机构为例,利用 MATLAB所具有的符号计算、数值计算以及图形可 视化处理等功能,对该机构的运动分析,提高了设计 的精度和设计效率。 对构件l、2、3、6组成的曲柄导杆机构

平面六杆机构的运动分析 豆丁网
20141218 平面六杆机构的运动分析,平面机构的运动分析,平面四杆机构,平面五杆机构,平面机构,平面功能分析图,平面广告案例分析,平面设计案例分析,平面连杆机构 文档格式:.doc 文档大小: 418.0K 文档页数: 16 页 顶 /踩数: 0 / 0 6 0颚式破碎机机械运动简图,,颚式破碎机机械运动简图 颚式破碎机介绍及结构简图豆丁建筑颚式破碎机工作原理:电动机驱动皮带和皮带轮,通过偏心轴使动颚上下 运动,当动颚上升时肘板与动颚间夹角变大,从而推动动颚板向固定颚板接近,与此同时物料被压碎